Interfaces para visión artificial
Elegir la interfaz correcta para su aplicación de visión artificial es una decisión clave en el proceso de selección de la cámara. Las siguientes secciones brindan una descripción general, ventajas y desventajas de los diferentes tipos de cables y conectores disponibles para las aplicaciones de visión artificial.
Las interfaces de visión artificial suelen ser de dos tipos: específicas y generales.
Interfaces específicas
Son útiles cuando las resoluciones o velocidades extremadamente altas de las aplicaciones justifican el uso de dichas interfaces. Por ejemplo, cámaras lineales que se utilizan para inspeccionar procesos de flujo continuo, como en la producción de papel o películas de plástico en las que las cámaras suelen funcionar en el rango de los kHz. Sin embargo, en general, estas interfaces representan un gasto mucho mayor, son menos flexibles y hacen que el sistema sea más complejo. CarmeraLink (compatible con un máximo de 6,8 Gbit/s de datos) y CoaXPress (compatible con un máximo de 12 Gbit/s) son interfaces de visión artificial específicas que suelen usarse en dichas aplicaciones. Además de las cámaras, los sistemas que usan estas interfaces requieren capturadores de cuadros. Son tarjetas de adaptador especializadas para recibir datos de imagen y compilarlos en imágenes que puedan usarse. Las interfaces de visión artificial específicas también usan cables patentados, lo cual dificulta un poco la integración con otros periféricos.
CoaXPress (CXP)
La interfaz CoaXpress se lanzó en 2008 para ser compatible con aplicaciones de procesamiento de imágenes de alta velocidad. Las interfaces CXP usan cables coaxiales de 75 ohm y son compatibles con velocidades máximas de transferencia de datos de 6,25 Gbit/s por canal, con la capacidad de utilizar múltiples canales para lograr tasas de transferencia de datos mayores. Un cable CXP puede suministrar hasta 13 W de potencia por cable y requiere que tanto el "dispositivo" como el "host" sean compatibles con la interfaz de programación de cámara GenICam. Si bien los cables coaxiales de una sola vía no son costosos, el coste de los conjuntos de cables de varias líneas y los dispositivos de captura de cuadros aumenta rápidamente.
CameraLink
Automated Imaging Association (AIA) lanzó el estándar CameraLink en el año 2000 y se actualizó de forma progresiva para ser compatible con velocidades de datos más altas, con ciertas versiones que requieren dos cables para la transmisión. Las tres configuraciones principales disponibles incluyen básica (2,04 Gbit/s), media (5,44 Gbit/s) y deca/extendida (6,8 Gbit/s). El estándar básico usa un conector MDR ("Mini D Ribbon") de 26 clavijas, mientras que la configuración media/completa duplica la capacidad con un segundo cable. Las versiones deca/extendidas superan los límites que impone CameraLink, con un máximo de datos de 6,8 Gbit/s. Al igual que las interfaces CXP, CameraLink requiere capturadores de cuadros y, además, debe ser compatible con el estándar Power over Camera Link (PoCL) a fin de suministrar potencia. CameraLink no cuenta con capacidades de corrección de fallos o reenvío, lo cual implica la necesidad de configuraciones de cable costosas e incómodas a fin de intentar eliminar las imágenes de baja calidad al maximizar la integridad de la señal.
Interfaces generales
Estas interfaces permiten que las cámaras de visión artificial se conecten con sistemas host a través de estándares de USB y Ethernet de amplia disponibilidad. Para la mayoría de las aplicaciones de visión artificial, las interfaces generales con USB 3.1 Gen 1 y Gigabit Ethernet brindan una combinación ideal de practicidad, velocidad, simpleza y asequibilidad. Además, las interfaces generales son compatibles con hardware y periféricos de amplia disponibilidad para la implementación de visión artificial. Los hubs, conmutadores, cables y tarjetas de interfaz USB y Ethernet pueden adquirirse en cualquier lugar, desde Amazon hasta la tienda de informática o artículos de electrónica local, con precios variados para adaptarse a sus necesidades particulares. La mayoría de las PC, portátiles y sistemas integrados incluyen al menos un puerto Gigabit Ethernet y USB 3.1 Gen 1 cada uno.
La diferencia más obvia entre estas categorías de interfaz es el ancho de banda. Las interfaces más rápidas permiten frecuencias de imagen más altas (Fig. 1) para una resolución determinada. Una interfaz más rápida le permite capturar más imágenes por segundo o capturar imágenes de mayor resolución sin sacrificar el rendimiento.
Por ejemplo, para un sistema de inspección de wafers de semiconductores que se actualiza de wafers de 8" a 12", se necesitarán cámaras de mayor resolución. En este caso, el diseñador del sistema tendrá que escoger entre mantener la interfaz existente y optar por una resolución más alta y un rendimiento menor o actualizar a una interfaz más rápida para mantener o mejorar el rendimiento.
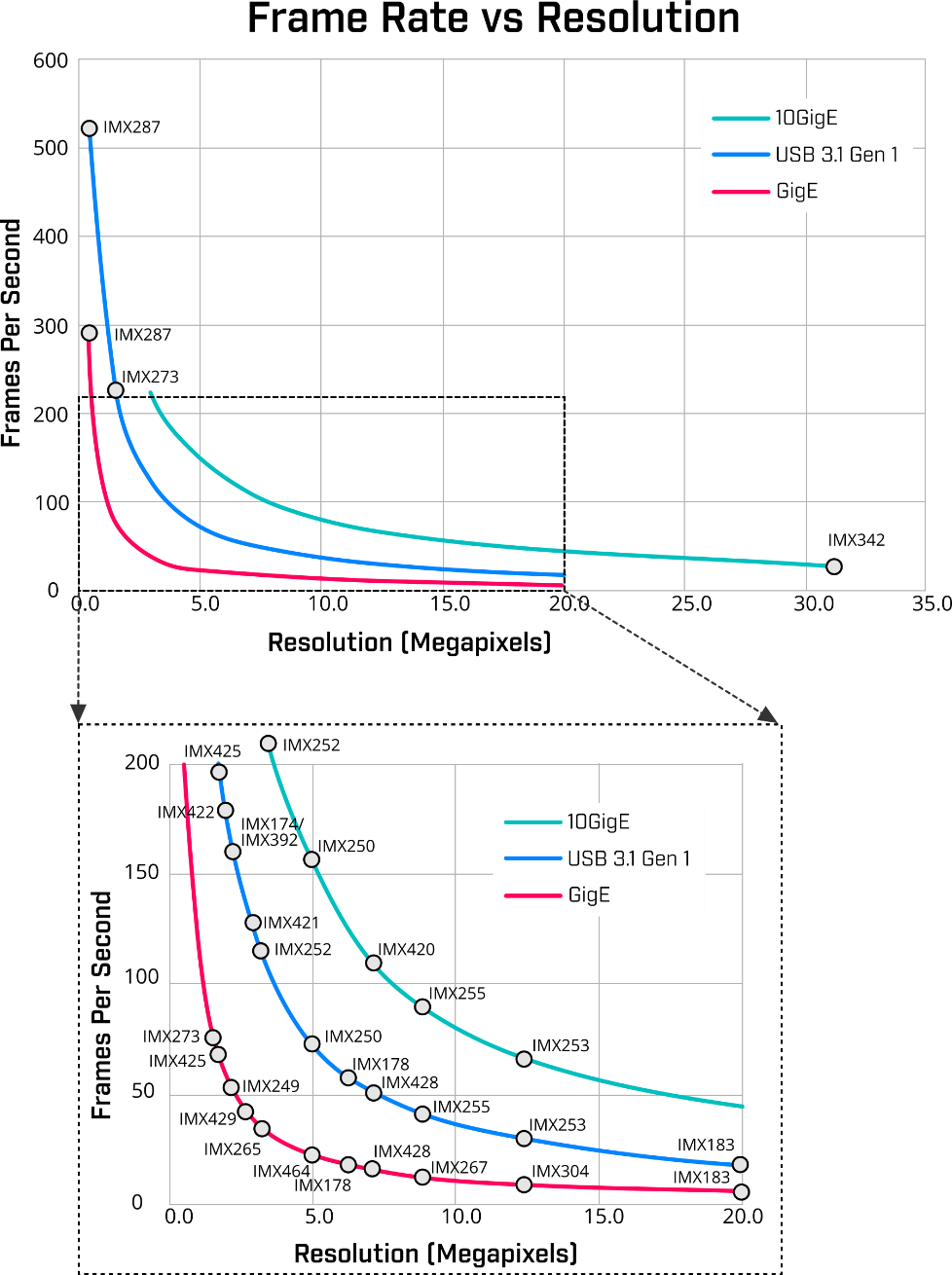
Fig. 1. Ancho de banda disponible para cada interfaz en comparación con la resolución del sensor y la velocidad de fotogramas resultante.
Deberían tenerse en cuenta los requisitos de resolución, la velocidad de fotogramas, la longitud de cable y la configuración del sistema host a fin de asegurarse de obtener el rendimiento que necesita sin gastar de más. Las cámaras de visión artificial de FLIR son compatibles con las tres interfaces confiables y de amplia disponibilidad.
Bus Universal en Serie (USB)
Las conexiones USB están en todos lados. Mire a su alrededor y cuente todos los dispositivos y accesorios USB. ¿Lo ve? La mayoría de las cámaras de visión artificial USB usan la interfaz USB 3.1 Gen 1. Esta interfaz le brinda hasta 4 Gibt/s de ancho de banda de datos de imagen entre la cámara y el sistema host. El estándar de visión USB3 ayuda a garantizar la compatibilidad entre una amplia gama de cámaras y software al definir un conjunto común de protocolos de detección de dispositivos, transferencia de imágenes y control de cámara.

Fig. 2. Cable USB 3.1 Gen1 (USB a USB locking)
USB es compatible con acceso directo a memoria (DMA). Con esta capacidad de DMA, pueden transferirse datos de imagen directamente desde la conexión USB hasta la memoria, donde estarán disponibles para los usuarios. La combinación de DMA con la amplia compatibilidad de USB y la disponibilidad de drivers para controladores USB en prácticamente cualquier plataforma de hardware hace que la conexión USB sea ideal para usarse en sistemas integrados. La longitud máxima de cable de 5 m de USB 3.1 Gen 1 no suele ser un problema en los sistemas integrados. USB 3.1 Gen 1 puede simplificar el diseño del sistema con un suministro de hasta 4,5 W de potencia a una cámara. El desarrollo reciente de suministro de potencia USB permite que algunos hosts ofrezcan más energía a dispositivos como teléfonos móviles de carga rápida. Esta especificación es independiente del estándar básico USB 3.1 Gen 1 y no la adoptaron los fabricantes de cámaras de visión artificial.
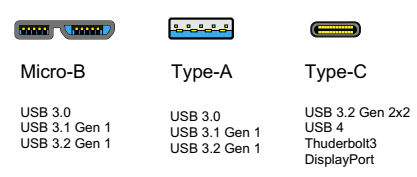
Fig. 3. Diferentes tipos de conectores USB
Los cables USB de alta flexibilidad ayudan a maximizar la vida útil de los cables en sistemas donde la cámara debe moverse con frecuencia. Pueden usarse cables ópticos activos (AOC) para alargar la distancia de funcionamiento en gran medida y brindar resistencia a la interferencia electromagnética (EMI). El rendimiento de los cables ópticos activos depende de los requisitos de rendimiento y de la configuración del sistema host. Al usar cables ópticos, incluso los que suministran potencia mediante el cable, FLIR recomienda dar energía a las cámaras de forma externa mediante GPIO. Además, los cables USB Locking brindan una conexión segura entre cables, cámaras y sistemas host. Antes de adquirir cables Locking, FLIR recomienda verificar la posición del tornillo de cierre y la compatibilidad con el espacio, ya que hay varias opciones disponibles.
USB 3.1 Gen 1 está disponible para FLIR Blackfly S, versiones en caja y de circuito y para la pequeña Firefly S.
Gigabit Ethernet (GigE)
GigE brinda un ancho de banda de datos de imagen máximo de 1 Gbit/s. Al combinar simplicidad, velocidad, una longitud de cable máxima de 100 m y la capacidad de suministrar potencia a las cámaras mediante un solo cable hacen que sea una interfaz de cámara de gran popularidad. Los cables Ethernet están disponibles con un blindaje sólido. Es ideal para entornos donde hay gran interferencia electromagnética causada por la proximidad a los motores potentes de ciertos robots y equipos de metrología. Las cámaras GigE de FLIR también son compatibles con una función de reenvío de paquetes que mejora en mayor medida la confiabilidad de la transmisión.
A diferencia de la conexión USB, GigE no es compatible con DMA. Los paquetes que contienen datos de imagen se transmiten al host, donde deben volver a ensamblarse en imágenes antes de copiarse a la memoria accesible al software. Si bien este proceso es trivial en las PC modernas, puede causar latencia para ciertos sistemas integrados de baja potencia con recursos limitados.

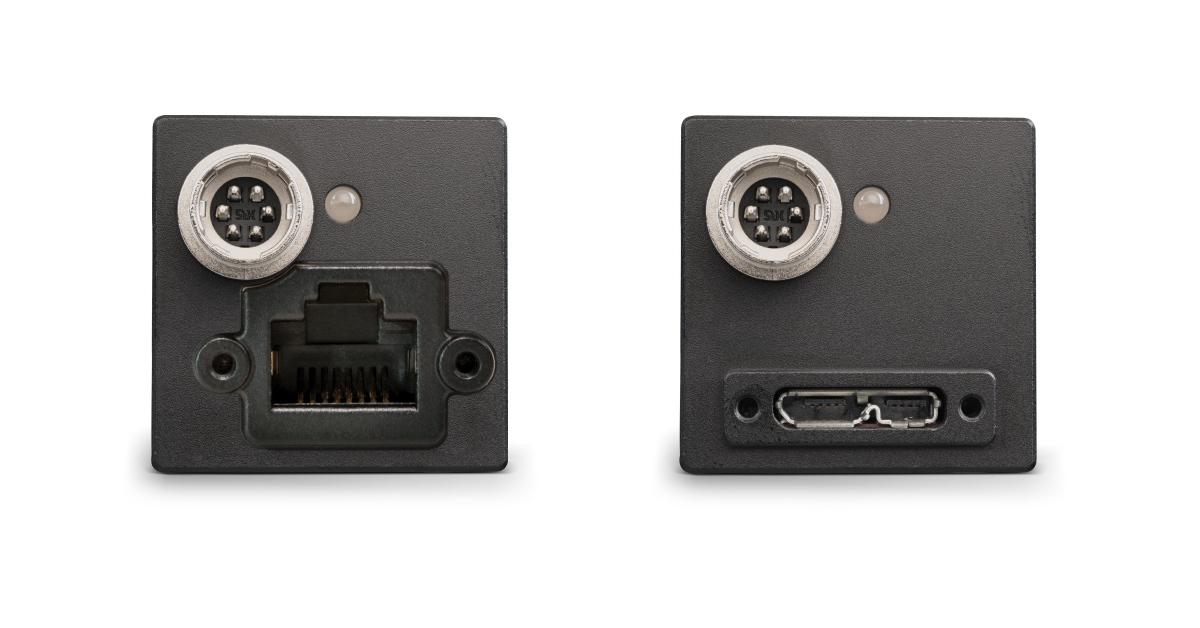
Fig. 4. Cable Gigabit Ethernet/GigE (RJ45 a RJ45)
La adopción generalizada de Gigabit Ethernet implica que hay una amplia gama de productos compatibles, desde cables hasta conmutadores, preparados para cumplir con los requisitos de cualquier proyecto. Las cámaras GigE son compatibles con el protocolo de sincronización de tiempo IEEE1588 PTP, lo cual permite que las cámaras y otros dispositivos habilitados para Ethernet, como actuadores y controladores lógicos programables industriales, operen según una marca de tiempo común con sincronización precisa.
La adopción generalizada de Ethernet en varias industrias ha permitido que muchos cables y conectores especializados estén disponibles para una amplia gama de casos de uso. Por ejemplo, hay cables Ethernet diseñados para la protección contra la EMI (interferencia electromagnética), la resistencia contra altas temperaturas y químicos, mientras otros satisfacen requisitos de alta flexibilidad, entre otros.
Los cables Ethernet tienen un número de categoría según su construcción. CAT5e es la más común para GigE, si bien pueden usarse CAT6A, CAT7 y CAT8 para una mayor resistencia a la EMI que implica un mayor coste y diámetro de cable. Algunos dispositivos industriales usan un conector industrial M12 con codificación X (Fig. 3, derecha) para ofrecer un blindaje mejorado, sin embargo, el conector RJ-45 conocido es suficiente y brinda mayor confianza a un precio reducido. Además, los conectores RJ45 con tornillo de bloqueo añaden seguridad con facilidad a los cables RJ45.

Fig. 5. El conector RJ45 clásico (izquierda) y el conector M12 menos común con codificación X (derecha)
Nota: El conector RJ45 es rápido de conectar y desconectar. El conector M12 con codificación X (derecho) es más lento para conectar, pero es más sólido y está disponible en versiones con clasificación IP.
GigE está disponible en las cámaras FLIR Blackfly S en caja y FLIR Blackfly S de circuito.
Ethernet 10Gigabit (10GigE)
10GigE aumenta las fortalezas de GigE al mejorar el ancho de banda a 10 Gbit/s. 10GigE es una interfaz ideal para el escaneo 3D de alta resolución, la captura volumétrica y la metrología de precisión. GigE y 10GigE pueden combinarse de muchas formas. Pueden conectarse varias cámaras GigE a un conmutador 10GigE para ser compatibles con varias cámaras GigE a velocidad completa en un solo puerto 10GigE en un sistema host. Si bien los cables CAT5e funcionarán con cámaras 10GigE en distancias menores a 30 m, se recomiendan cables CAT6A o superiores.
¡10 Gbit/sec son muchos datos! Los sistemas de PC modernos con CPU de alta velocidad, PCIe 3.0 y memoria de doble canal pueden manejar esto, mientras que los sistemas de mayor rendimiento son compatibles con varias cámaras 10GigE. En general, los sistemas integrados con menos recursos no tendrán el ancho de banda de memoria y la velocidad del procesador necesarios para manejar los datos de imagen de entrada.
10GgiE está disponible en las cámaras FLIR Oryx.
Resumen
Las interfaces generales y específicas se usan en muchas aplicaciones de visión artificial. Las ventajas y desventajas mencionadas en las secciones anteriores determinarán cuál de ellas es apta para un caso de uso específico. Sin embargo, la combinación de rendimiento, facilidad de uso, amplia disponibilidad y bajo coste hacen que las interfaces generales sean una opción atractiva para la mayoría de las aplicaciones de visión artificial.
Más información sobre visión artificial
¡Estamos aquí para ayudarlo!
Póngase en contacto hoy mismo con un especialista en cámaras.
Artículos relacionados
-
 Aprendizaje profundo
Aprendizaje profundo
Inferencia perimetral con la FLIR Firefly®
Lea la historia -
 Tecnología de sensores y revisión
Tecnología de sensores y revisión
Acerca del Sony Pregius IMX342 APS-C
Lea la historia -
 Sistemas integrados
Sistemas integrados
Guía de integración de cámaras de nivel de placa
Lea la historia