Siete formas de garantizar el éxito al elegir cámaras para sistemas de transporte inteligentes
Encontrar la cámara adecuada para un ITS puede ser abrumador, pero los integradores y los fabricantes de equipos originales pueden tener éxito siguiendo estas directrices.
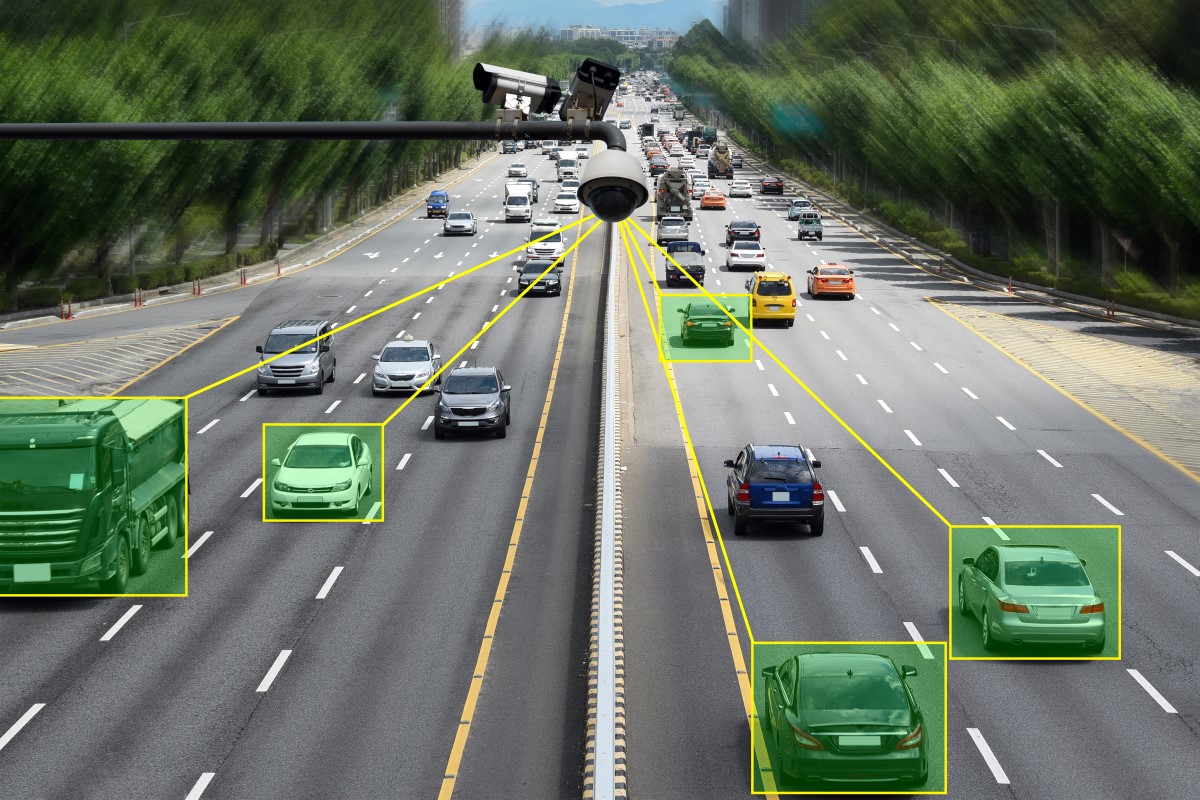
Los sistemas de transporte inteligente (ITS) mejoran la seguridad y movilidad del transporte, aumentan la productividad, imponen leyes y, en última instancia, ayudan a generar ingresos. Sin embargo, si no se tienen en cuenta los entornos exigentes y las necesidades de aplicaciones específicas al elegir cámaras para un ITS, el sistema no tendrá éxito. Además, con una cantidad apabullante de opciones resulta difícil saber por dónde empezar.
Las cámaras se utilizan de forma prominente en la tecnología ITS en aplicaciones como la monitorización del tráfico, el reconocimiento automático de matrículas (ALPR; denominado reconocimiento automático de matrículas, o ANPR, en el Reino Unido), el control de acceso, la monitorización de carriles de vehículos de alta ocupación (HOV), el cumplimiento de estacionamientos, el cumplimiento de la velocidad y la protección de activos. Dependiendo de la aplicación, quizás se necesiten diferentes tipos de cámaras y sistemas. Todas las implementaciones plantean desafíos, ya sea que las configuraciones de la cámara requieran largos recorridos de cable y la capacidad de soportar entornos duros o que necesiten sistemas integrados con capacidades de procesamiento perimetral para obtener una respuesta rápida. La consideración cuidadosa de estos factores puede garantizar el éxito del sistema, un menor coste de propiedad y operaciones preparadas para el futuro. Este artículo presenta retos y métodos comunes para superarlos y ayudar a posicionar a los ITS para el éxito.
Empiece por la calidad de imagen
Al investigar cámaras para aplicaciones ITS, toda planificación debe comenzar por la calidad de imagen. En el caso de las aplicaciones ANPR/ALPR, el sistema cumple dos tareas principales: reconocer que hay un número/una matrícula en el campo de visión de la cámara y luego descodificar la matrícula. Ambas tareas están sujetas a errores. Los sistemas ANPR/ALPR exitosos requieren imágenes de alta calidad para que el software realice tareas de reconocimiento óptico de caracteres (OCR) y verificación óptica de caracteres (OCV). Los diseñadores e integradores de sistemas necesitan cámaras potentes.
>>>Pruebe nuestro selector de cámara, que permite ordenar por eficiencia cuántica y rango dinámico.
Las cámaras con sensores de imagen de baja calidad no producen imágenes de alta calidad, por lo que el sensor de imagen debe ser una consideración fundamental. La luminosidad de las escenas ITS puede variar considerablemente debido a las condiciones cambiantes de iluminación exterior; además, una cámara debe poder capturar y proporcionar datos y detalles de las partes más brillantes y oscuras de una imagen y variaciones entre ellas, independientemente de las condiciones de iluminación. La medición de la capacidad de una cámara para detectar intensidades de luz más altas y máximas y mínimas se denomina “rango dinámico”; cuanto más altos sean los decibelios (dB), mejor. Los sensores de imagen de alta calidad como los sensores de imagen CMOS con obturador global de las líneas Pregius y Pregius S de Sony ofrecen una alta sensibilidad de rango dinámico, lo que los hace ideales para una gran variedad de aplicaciones ITS.
La familia de cámaras Blackfly S de Teledyne FLIR ofrece una impresionante gama de modelos de cámara basados en los sensores de imagen Sony Pregius y Pregius S. Estos van desde 1,6 megapíxeles hasta 26 megapíxeles, lo que los hace adecuados para una amplia variedad de tareas ITS diferentes. Las cámaras BFS-PGE-161S7C-C (color) y BFS-PGE-161S7M-C (monocromo), por ejemplo, incorporan el sensor Sony IMX542 Pregius S de 16,1 megapíxeles con un rango dinámico de 70,46 dB, una capacidad de saturación electrónica de 9609 y medidas de eficiencia cuántica de 45,76 % a 470 nm (azul), 52,26 % a 525 nm (verde) y 33,49 % a 630 nm (rojo). Comprar una cámara de alta resolución cuando la aplicación no la necesita añade coste al proyecto total, pero tiene sentido si se tienen en cuenta escenarios futuros. Los integradores y fabricantes originales, por ejemplo, pueden preparar sus operaciones para el futuro, permitiendo así la expansión vial y evitando tener que cambiar las cámaras de menor resolución más adelante.
>>>Aprenda a leer y comparar las especificaciones de rendimiento de imágenes
Captación del color, superación del resplandor
El color es otra medición de calidad importante. En el caso de ANPR/ALPR, mientras que las imágenes en blanco y negro muestran el número/la matrícula, las imágenes en color proporcionan contexto sobre lo que ocurre en una situación dada (semáforo, señales de carretera codificadas por colores, etc.). El color también es importante en situaciones en las que las cámaras montadas en los vehículos comprueban si hay coches mal aparcados. En España, por ejemplo, las líneas azules de la calle indican que un conductor debe pagar por la plaza de aparcamiento, mientras que las líneas verdes indican que la plaza es para alguien que vive en el vecindario. Los sistemas de visión integrados pueden comprobar automáticamente las infracciones, pero necesitan una reproducción del color de alta calidad para hacerlo.
>>>Obtenga más información sobre la captura de colores uniformes aquí.
Los sensores de imagen tienen una respuesta particular a la iluminación (eficiencia cuantitativa) y cada condición de iluminación, como la luz solar, tiene su propio espectro de emisión, lo que afecta a la forma que tendrá una imagen cuando se capture. La eficiencia cuántica determina la capacidad de un sensor de imagen para convertir fotones en electrones y varía dependiendo de la longitud de onda. Las herramientas de recopilación de color tienen en cuenta cómo interactúa cada canal de color con los demás, y escalan de forma independiente cada canal de color. Una matriz correctora del color mide y compensa estas interacciones para reproducir con mayor precisión los colores del mundo real de un sujeto determinado. Esto es especialmente importante en aplicaciones en las que pequeñas diferencias de color pueden afectar negativamente a la precisión y fiabilidad de los resultados.
Las cámaras y los sistemas de visión en ocasiones pueden tener dificultades al enfrentarse a reflejos y deslumbramientos en superficies reflectantes como el vidrio. Por ejemplo, si un ITS desea mirar un coche para supervisar el carril VAO, los reflejos y el resplandor del sol pueden impedir que la cámara capture imágenes del interior del coche. Teledyne FLIR ofrece dos cámaras (una GigE, una USB) basadas en el sensor de polarización monocromo de 5 megapíxeles Sony IMX250MZR y una cámara (USB3) basada en el sensor de polarización RGB de 5 megapíxeles Sony IMX250MYR.
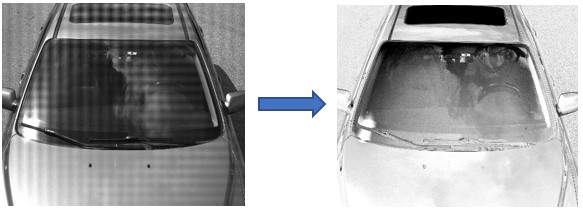
Figura 2: Las cámaras de polarización pueden capturar imágenes del interior del coche incluso en situaciones difíciles en las que pueden estar presentes reflejos o deslumbramiento.
Busque un experto en hardware
Ciertos integradores y fabricantes originales del sector ITS pueden tener más experiencia en software que en hardware. Elegir, probar y optimizar el hardware supone un reto, pero un proveedor de cámaras experimentado puede ofrecer asesoramiento técnico sobre el proyecto y ayudar a seleccionar y configurar las cámaras. El proveedor también debe proporcionar referencias a socios de confianza cuando trate con accesorios y servicios no ofrecidos por la empresa, incluidos lentes, cableado, carcasa y desarrollo de software.
Los fabricantes de equipos originales y los integradores también necesitan asistencia durante la fase de diseño y desarrollo, así como ayuda con la configuración del sistema y el asesoramiento de software. Los usuarios deben buscar empresas de cámaras que proporcionen estos servicios a través de una combinación de ingenieros de sistemas y equipos de asistencia con llamadas de registro frecuentes. Antes de elegir un proveedor de hardware, los usuarios finales también deben preguntar sobre el soporte del sistema, así como sobre cómo el proveedor se encarga de las relaciones con los clientes.
Cómo encontrar el equilibrio: SWaP-C y rendimiento
El término SWaP-C, un término popular en investigación y desarrollo, así como en aplicaciones militares, significa “tamaño, peso, potencia y coste”. Las aplicaciones de todo tipo requieren dispositivos, sistemas y programas con un SWaP-C óptimo. Las aplicaciones de ITS no son diferentes. Las cámaras ITS de bajo coste a nivel de placa han crecido en popularidad en los últimos años. Sin embargo, las cámaras que vienen en paquetes más pequeños no son suficientes. Estas cámaras deben encontrar un equilibrio entre el SWaP-C y el rendimiento. Una manera de que Teledyne FLIR equilibre esto es garantizando que todas sus cámaras a nivel de placa tengan el mismo conjunto de funciones que las versiones en caja de la cámara.
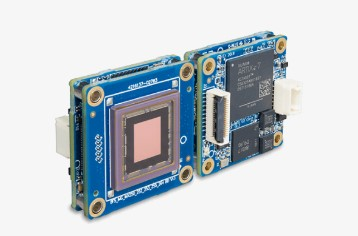
Figura 3: A pesar del diseño compacto, las cámaras a nivel de placa Teledyne FLIR ofrecen los mismos conjuntos de funciones que sus equivalentes en caja.
Una tendencia de ITS consiste en desplegar cámaras de mayor resolución para cubrir múltiples carriles en una autopista. Los integradores que anteriormente utilizaban cámaras a nivel de placa con sensores de imagen de baja resolución pueden intentar actualizar una cámara de 1,3 megapíxeles con una cámara de 8,9 megapíxeles o 12 megapíxeles, por ejemplo. Si la nueva cámara no tiene el mismo factor de forma que el modelo anterior, sin embargo, el integrador deberá rediseñarla y volver a certificarla. Teledyne FLIR ofrece cámaras a nivel de placa con el mismo factor de forma (en múltiples resoluciones) para que los integradores puedan actualizar los sistemas mucho más fácilmente.
Un cambio hacia la integración
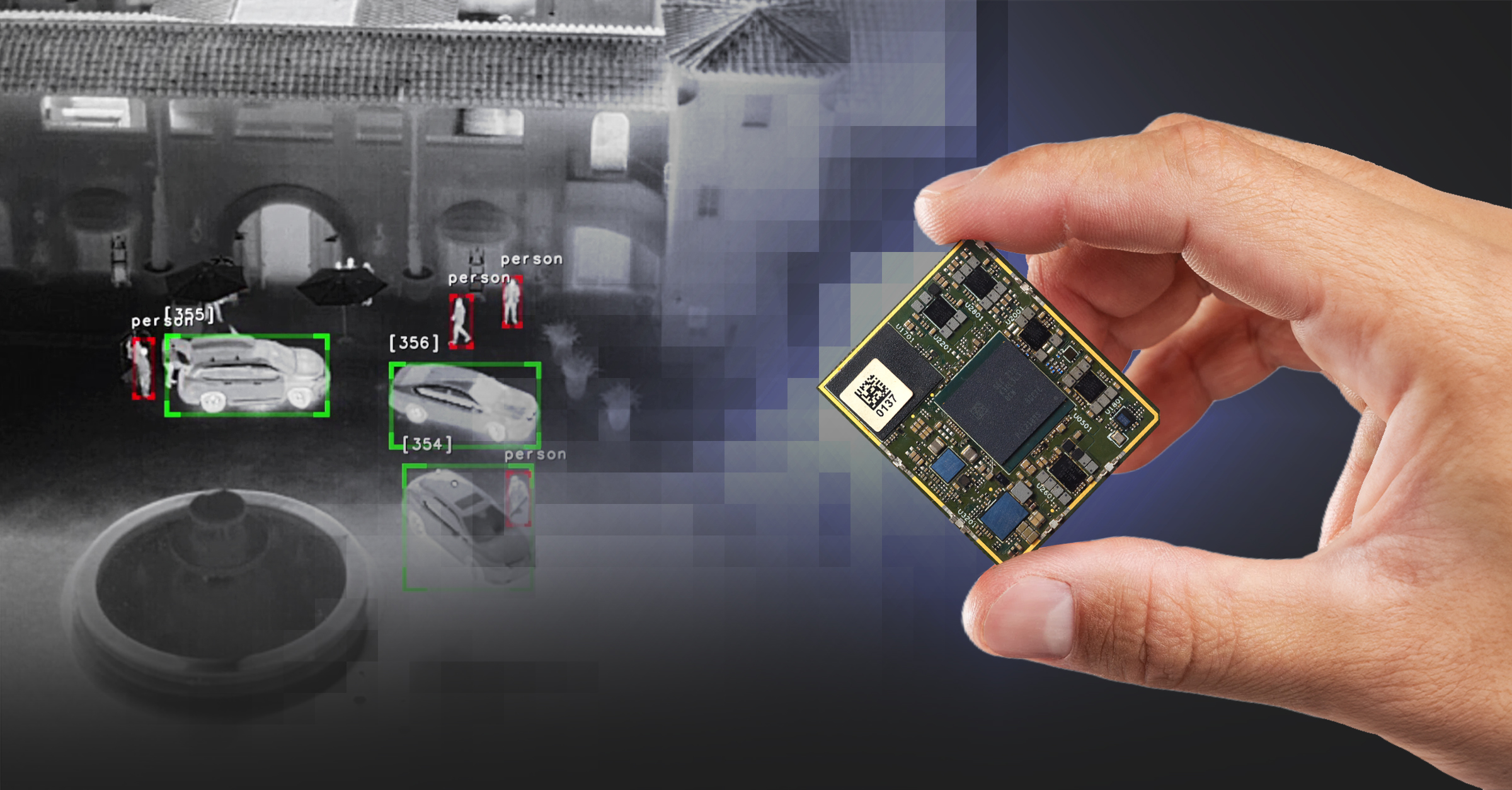
Al igual que con el mercado de visión automática, ITS ha visto un cambio hacia sistemas integrados con capacidades de informática periférica en un diseño de factor de forma pequeño y baja potencia. La aplicación que primero viene a la mente cuando se piensa en sistemas integrados en ITS es la implementación en vehículo, pero los sistemas integrados pueden adaptarse a casi cualquier aplicación de ITS o de ciudad inteligente.
Los integradores deben evaluar algunas de las opciones de hardware integrado más populares para un posible ajuste. Por ejemplo, ¿pueden las cámaras funcionar con módulos integrados Xavier o Jetson TX2 de NVIDIA? Muchas aplicaciones de ITS implican algoritmos sofisticados y requieren un sistema capaz de procesarlos.
Para ello, Teledyne FLIR lanzó la placa portadora Quartet™ para TX2. Específicamente personalizado para aplicaciones ITS, permite a los clientes conectar directamente cuatro cámaras USB3 de placa al TX2 sin necesidad de hubs o convertidores. Cada conector de la tarjeta de alimentación a través de cable tiene su propio bus, por lo que no necesita compartir ancho de banda con otras conexiones. Por ejemplo, con el Quartet, los integradores pueden implementar simultáneamente una cámara en color de alta resolución para el contexto general, una cámara monocroma para ANPR/ALPR y una cámara polarizada para ver a través de los parabrisas, todo en un único sistema conectado.
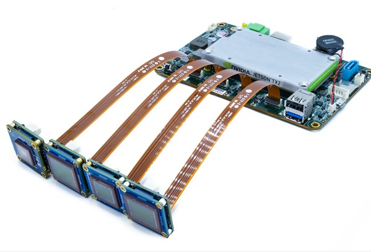
Figura 4: Diseñada para Jetson TX2, la placa portadora Quartet puede conectarse a cuatro cámaras en aplicaciones con limitaciones de espacio.
Diseño resistente y fiable
Las cámaras implementadas en las aplicaciones de ITS deben poder manejar la tarea desde un punto de vista físico. En el caso de aplicaciones sobre el vehículo, los integradores deben tener en cuenta la capacidad de la cámara para funcionar a temperaturas extremas, por ejemplo. Aunque muchas cámaras están integradas en una carcasa protectora para resistir el clima, las cámaras todavía deben trabajar a temperaturas altas (por encima de los 50 grados Celsius); Teledyne FLIR se asegura de que todos sus modelos de cámara hayan pasado satisfactoriamente por pruebas HALT (pruebas de vida útil altamente aceleradas), asegurando que no se produzcan fallos de cámara de -30 a 80 grados Celsius.
Los integradores también deben tener en cuenta los golpes y las vibraciones al elegir una cámara. Las cámaras deben cumplir con las especificaciones del sector para golpes y vibraciones, para garantizar la calidad de imagen y la fiabilidad del sistema a largo plazo. Al comprar una cámara, los integradores deben investigar el tipo de pruebas a las que se han sometido. Las pruebas de vibración realizadas en cámaras Teledyne FLIR se documentan públicamente.
En general, las cámaras ITS deben ser extremadamente fiables. “La mejor habilidad es la disponibilidad”, como suele decirse en el mundo del deporte. Las cámaras deben ser capaces de realizar las tareas necesarias durante mucho tiempo sin averías y sin necesidad de sustituirlas. Todos los integradores de ITS conocen el coste y las molestias que implica cambiar de cámara en un sistema que ya está implementado. Los integradores pueden evitar las molestias y la vergüenza eligiendo cámaras de alta calidad que han demostrado su rendimiento en un entorno ITS durante muchos años.
Cómo aprovechar las marcas de tiempo y los datos de GPS
Las cámaras GigE Vision son populares en las aplicaciones ITS por varios motivos, incluida su capacidad para admitir longitudes de cable extremadamente largas. Otra razón, quizás algo menos conocida, es su capacidad para admitir el protocolo de tiempo de precisión (PTP) IEEE 1588. Cámaras compatibles con IEEE 1588 PTP que permiten obtener imágenes con una marca de tiempo precisa en el punto de exposición. Además, el estándar proporciona capacidades avanzadas, como permitir que varias cámaras ejecuten la adquisición de imágenes sincronizada basada en un comando interno basado en el tiempo, sin requerir activación externa.
Figura 5: El retraso de ruta se calcula y factoriza para sincronizar los relojes entre los dispositivos. El principal envía dos señales al subordinado en (1) y (2). El secundario luego envía una señal de vuelta (3) y se calcula el retraso de la ruta que se aplica para sincronizar los relojes (4).
Este estándar es importante porque proporciona la capacidad de sincronizar con hardware externo e integrar datos GPS en flujos de imágenes. Un ejemplo de esto es la detección precisa de vehículos que infringen el límite de velocidad (sin radar). Las marcas de tiempo de dos puntos diferentes pueden ayudar a determinar si un vehículo ha superado el límite de velocidad, y los tiempos de imagen precisos de ambos puntos también simplificarán el análisis de velocidad de alta precisión.
Las marcas de tiempo también son importantes para la aplicación automática de peajes basados en un pórtico. Una marca de tiempo inexacta no producirá una imagen del coche en su totalidad; la marca de tiempo debe estar sincronizada para la aplicación del peaje. Cuando se trata del diseño del sistema, se debe considerar la necesidad de la marca de tiempo antes de la compra.
Cómo lograr el éxito del sistema
Inevitablemente, algunas cámaras disponibles en el mercado actual acabarán fallando y causarán dolores de cabeza… por no mencionar tiempo perdido, dinero, reputación y confianza pública. Al evaluar las cámaras, recuerde tener en cuenta la calidad de imagen, la flexibilidad del hardware, las capacidades integradas, el diseño físico y la fiabilidad, así como la importancia de las marcas de tiempo y los datos GPS. Al considerar estos factores, los integradores se preparan para el éxito general del sistema.
Teledyne FLIR ofrece una gama de cámaras industriales compactas y resistentes que se pueden implementar de forma fiable en varios proyectos ITS y cubrir necesidades de baja resolución (1,3 megapíxeles) hasta las necesidades de alta resolución (más de 20 megapíxeles) para cobertura multilínea. Póngase en contacto con nosotros hoy mismo para saber cómo nuestras cámaras pueden transformar su aplicación ITS, ya sean de serie o personalizadas según sus necesidades específicas.

Figura 6: Cámaras como la Blackfly S de Teledyne FLIR aprovechan la última tecnología de sensor de imagen CMOS de las líneas Pregius y Pregius S de Sony.
Artículos relacionados
-
 Comunicado de prensa
Comunicado de prensa
New Qualcomm-Built Advanced Video Processor by Teledyne FLIR Powers AI at the Edge
Lea la historia -
 Aprendizaje profundo
Aprendizaje profundo
Inferencia perimetral con la FLIR Firefly®
Lea la historia -
 Tecnología de sensores y revisión
Tecnología de sensores y revisión
Acerca del Sony Pregius IMX342 APS-C
Lea la historia